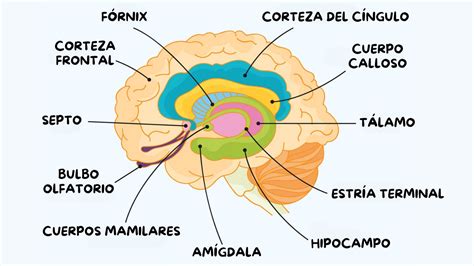
Para referirnos al control motor lo haremos desde lo simple a lo complejo. Todo está regulado por ello, donde el cerebro es la estructura y se encuentran los comandos que dirigen al cuerpo y dan las características del movimiento, siendo esto tan importante para la vida misma.
Para alimentarnos, llevamos la comida a la boca mediante un acto motor controlado por el cerebro. El acto de la deglución, que muchas veces esta alterado, también está comandado por el cerebro. Para desplazarnos, caminar, correr o saltar, lo hacemos gracias al movimiento controlado por el cerebro. Es por eso que es importante destacar lo que es el control motor.
En muchas enfermedades se altera o pierde el movimiento, como, por ejemplo, síndromes hipocinéticos, enfermedad de Parkinson, balismo, atetosis, síndrome de piernas inquietas, entre otras, y la mayoría asociada al adulto mayor.
Concepto de Control Motor y su Relevancia
El estudio de la causa y la naturaleza del movimiento resultan esenciales para la práctica médica. En las últimas décadas ha existido un especial interés por las teorías que podrían explicar el gobierno del control motor y sus aplicaciones. Estas teorías suelen basarse en modelos de función cerebral, reflejando criterios filosóficamente diferentes sobre la forma en la que el movimiento es controlado por el cerebro, enfatizando cada una de ellas en los distintos componentes neurales del movimiento.
Los métodos específicos habitualmente empleados en neurorrehabilitación vienen determinados por las suposiciones fundamentales sobre la causa y la naturaleza del movimiento, de forma que la teoría se constituye en la base teórica de la práctica médica.
Control Motor en el Contexto de la Neurorrehabilitación
Asimismo, en el contexto de las neurociencias, toma relevancia el concepto de aprendizaje motor, considerado como el conjunto de procesos internos asociados a la práctica y la experiencia, que producen cambios relativamente permanentes en la capacidad de producir actividades motoras a través de una habilidad específica. Por lo que ambos, control y aprendizaje motor, se posicionan como campos de estudio fundamentales para los profesionales sanitarios en el campo de la neurorrehabilitación.
La neurorrehabilitación, en términos generales, tendrá como objeto el mantenimiento de las habilidades existentes, la readquisición de habilidades perdidas y el aprendizaje de nuevas destrezas. Existen diversos factores que, siendo significativos desde el punto de vista de la neurorrehabilitación, influyen en los procesos de aprendizaje motor.
CONTROL MOTOR | Qué es, principios, función, en qué patologías se altera y cómo se recupera
Teorías sobre el Control Motor
Las diversas teorías sobre el control motor (CM) reflejan las concepciones existentes sobre la forma en la que el movimiento es controlado por el cerebro, enfatizando cada una de ellas en los distintos componentes neurales del movimiento. Los métodos específicos usados en neurorrehabilitación vienen, pues, determinados por las suposiciones fundamentales sobre la causa y la naturaleza del movimiento, lo cual se encarga de verificar o no dichas teorías.
Teoría Refleja
En 1906, el neurofisiólogo Sir Charles Sherrington sentó las bases de la teoría refleja del CM, en la que los reflejos eran los componentes básicos del comportamiento complejo para lograr un objetivo común. Describió este comportamiento en función de reflejos compuestos y su combinación sucesiva o encadenamiento. Un estímulo produciría una respuesta, la cual se transformaría en el estímulo de la siguiente respuesta.
Teoría Jerárquica
Esta teoría sostiene que el sistema nervioso central (SNC) se organiza de forma jerárquica, en áreas de asociación superiores, corteza motora y niveles espinales de función motora. Cada nivel superior ejerce control sobre el nivel menor, en una estricta jerarquía vertical, en la que las líneas de control no se cruzan y donde los niveles inferiores nunca ejercen dicho control. En los años 40, Gesell y McGraw desarrollan la teoría de la neuromaduración del desarrollo. El desarrollo motor normal es atribuido a la creciente corticalización del SNC que produce la aparición de niveles superiores de control sobre los reflejos de nivel inferior, siendo la maduración del SNC el agente primario para el cambio en el desarrollo, minimizando la influencia de otros factores. La teoría jerárquica ha evolucionado, reconociéndose que cada nivel puede actuar sobre los otros dependiendo de la actividad, considerándose los reflejos no como único determinante del CM, sino solo uno de los diversos procesos esenciales para la generación y control del movimiento.
Teorías de la Programación Motora
Las teorías más actuales acerca del CM se alejan de la idea de que sea un sistema fundamentalmente reactivo, habiendo comenzado a explorar la fisiología de las acciones en vez de la naturaleza de las reacciones. Se puede obtener una respuesta motora determinada tanto por un estímulo sensorial como por un proceso central en ausencia de un estímulo o impulso aferente, por lo que se debería hablar mejor de patrón motor central. Esta teoría, apoyada principalmente en el análisis de la locomoción en gatos, sugiere que es posible el movimiento en ausencia de una acción refleja, de tal manera que la red espinal neural podría producir un ritmo locomotor sin estímulos sensoriales ni patrones descendentes del cerebro, pudiéndose realizar el movimiento sin retroalimentación. Introduce el concepto de generadores de patrones centrales (GPC), circuitos neurales espinales específicos capaces de generar por sí mismos movimientos como el caminar y correr, y sobre los cuales los estímulos sensoriales entrantes ejercerían un importante papel modulador.
Teoría de Sistemas
Esta teoría explica cómo no se puede entender el control neural del movimiento sin entender las características de los sistemas que se mueven. Afirma que «los movimientos no son dirigidos ni central ni periféricamente, sino que emergen de la interacción de muchos sistemas». Se considera al cuerpo como un sistema mecánico sujeto a fuerzas externas (gravedad) e internas. Un mismo comando central puede ocasionar movimientos muy dispares debido a la interacción entre las fuerzas externas y las variaciones de las condiciones iniciales o bien, el mismo movimiento podría ser originado por comandos distintos. La teoría intenta explicar cómo afectan las condiciones iniciales las características del movimiento. Predice el comportamiento real mucho mejor que las teorías precedentes al considerar no solo los aportes del SN a la acción, sino también las contribuciones de diferentes sistemas, así como las fuerzas de gravedad e inercia.

Teoría de la Acción Dinámica
Del estudio de las sinergias surge esta teoría que observa a la persona en movimiento desde una nueva perspectiva. Considerando el principio de autoorganización, afirma que cuando un sistema de partes individuales se une, sus elementos se comportan colectivamente en forma ordenada, no siendo necesario un centro superior que envíe las instrucciones para lograr la acción coordinada. Propone que el movimiento surge como resultado de elementos que interactúan, sin la necesidad de programas motores. Esta acción dinámica trata de encontrar descripciones matemáticas de estos sistemas autoorganizados que seguirían un comportamiento no lineal, situación en la cual, cuando uno de los parámetros se altera y alcanza un valor crítico, el sistema entra en un patrón de comportamiento completamente nuevo. A través de estas formulaciones matemáticas sería posible predecir las formas en que un sistema dado actuará en diferentes situaciones. La perspectiva de la acción dinámica reduce la importancia de las nociones de comandos provenientes del SNC para controlar el movimiento y busca explicaciones físicas que también puedan contribuir a las características del movimiento.
Teoría del Procesamiento de Distribución en Paralelo (PDP)
La teoría del procesamiento de distribución en paralelo (PDP) describe la forma en que el SN procesa la información para actuar. El SN operaría tanto mediante procesos en serie (procesando la información a través de una vía única), como en paralelo, interpretando la información por medio de vías múltiples que la analizarían simultáneamente en diferentes formas. El supuesto fundamental es que el cerebro es un ordenador con células que interactúan en diversas formas y las redes neuronales son los sistemas computacionales esenciales del cerebro. La estrategia ha sido desarrollar modelos matemáticos simplificados de sistemas cerebrales y posteriormente estudiar estos para comprender la manera en que varios problemas de cálculo pueden ser resueltos por tales mecanismos. Los modelos consisten en elementos que están conectados por circuitos. Al igual que las sinapsis neurales, cada elemento puede ser afectado por los otros de forma positiva o negativa en distinta magnitud. Estos elementos se distribuirían en neuronas sensoriales, interneuronas y motoras. La eficiencia del desempeño dependerá de la cantidad de conexiones de salida y la fortaleza de la conexión.
Teoría Orientada a la Actividad
Greene indicó la necesidad de una teoría que explicase cómo los circuitos neuronales operaban para lograr una acción, lo que proporcionaría la base para una imagen más coherente del sistema motor. El método orientado a la actividad se apoya en el reconocimiento de que el objetivo del CM es el dominio del movimiento para realizar una acción particular, no para efectuar movimientos por el solo hecho de moverse. El control del movimiento se organizaría alrededor de comportamientos funcionales dirigidos a objetivos.
Teoría Ecológica
En los años sesenta, Gibson explora la forma en que nuestros sistemas motores nos permiten interactuar más efectivamente con el medio ambiente a fin de tener un comportamiento orientado al objetivo. Su investigación se centró en cómo detectamos la información del entorno pertinente para nuestras acciones y cómo la utilizamos para controlar nuestros movimientos. El individuo explora activamente su entorno, el cual, a su vez, sostiene la actividad del individuo, de tal manera que las acciones están orientadas al ambiente.
Aprendizaje Motor
El aprendizaje motor (AM) se define como el conjunto de procesos internos asociados a la práctica y la experiencia, que producen cambios relativamente permanentes en la capacidad de producir actividades motoras, a través de una habilidad específica. Lo que aprendemos se retiene o almacena en nuestro cerebro y constituye lo que denominamos memoria, no considerándose como aprendizaje las modificaciones a corto plazo.
Se considera generalmente que una habilidad es una característica o rasgo relativamente estable, típicamente asociado a un componente genético y que no puede alterarse fácilmente mediante la práctica o la experiencia. Otra manera de entender el concepto de habilidad es distinguiéndolo del de destreza. Al contrario que la primera, la destreza puede ser modificada mediante la práctica o la experiencia; de hecho, y de igual modo, puede ser adquirida a través de estas.
Muchos factores influyen en el AM, como la edad, la raza, la cultura o la predisposición genética. Cada persona posee sus destrezas como resultado del proceso de su aprendizaje.
Factores que Influyen en el Aprendizaje Motor y su Aplicación Clínica
En el contexto de la neurorrehabilitación, el aprendizaje motor es crucial. Los métodos específicos de neurorrehabilitación buscan el mantenimiento de habilidades existentes, la readquisición de habilidades perdidas y el aprendizaje de nuevas destrezas. Diversos factores son significativos en estos procesos:
- Instrucciones verbales claras.
- Características y variabilidad de la práctica.
- Participación activa y motivación del individuo.
- Transferencia positiva/negativa del aprendizaje.
- Control postural.
- Memoria.
- Retroalimentación adecuada.
Todos ellos son de aplicación clínica y son la base de las emergentes vías de investigación, así como de otras ya bien instauradas, en el reentrenamiento de la función sensitivo-motora del paciente neurológico. La neurorrehabilitación se enfoca en la readquisición del control postural y el equilibrio, la locomoción, el alcance, el agarre y la manipulación. También se consideran las posibilidades reales de las nuevas tecnologías de aplicación en la patología neurológica.
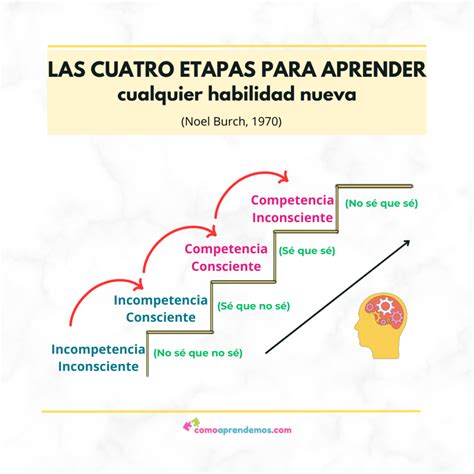
Modelo de los Tres Estadios de Fitts y Posner
Estos autores sugieren que existen tres etapas principales en el AM:
- En la etapa cognitiva, el paciente aprende una nueva destreza o reaprende una antigua. El individuo necesita practicar con frecuencia una tarea bajo supervisión y guía externa, siendo importante el cometer errores y saber corregirlos.
- En la etapa asociativa, el paciente consigue dirigir el programa dentro de restricciones ambientales específicas. Disminuirá el número de errores en la actividad y logrará realizar con menor esfuerzo la ejecución de la tarea. Los individuos comienzan a comprender cómo se interrelacionan los diferentes componentes de la destreza.
- En la etapa autónoma, el paciente consigue moverse dentro de una variedad de ambientes, manteniendo el control en todo el programa. El verdadero sello del aprendizaje es la capacidad de retener lo aprendido.
Consideraciones Actuales y Futuras
En la actualidad no existe un consenso sobre qué teoría o modelo es definitorio en dar explicación al gobierno del control motor. Las teorías sobre el aprendizaje motor deben ser la base para la rehabilitación motora. Las nuevas líneas de investigación deben aplicar los conocimientos generados en los campos del control y aprendizaje motor en neurorrehabilitación.